版权声明:本文为博主原创文章,未经博主允许不得转载;如需转载,请保持原文链接。
iOS 之 Thread调用栈学习
Mach 线程
iOS 是基于 Apple Darwin 内核,由 kernel、XNU 和 Runtime 组成,而 XNU 是 Darwin 的内核,它是“X is not UNIX”的缩写,是一个混合内核,由 Mach 微内核和 BSD 组成。Mach 内核是轻量级的平台,只能完成操作系统最基本的职责,比如:进程和线程、虚拟内存管理、任务调度、进程通信和消息传递机制。其他的工作,例如文件操作和设备访问,都由 BSD 层实现。
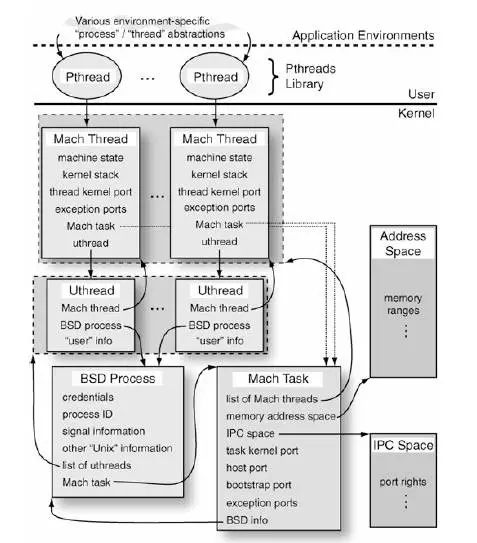
上述是权威著作《OS X Internal: A System Approach》给出的 Mac OS X 中进程子系统组成的概念,与 Mac OS X 类似,iOS 的线程技术也是基于 Mach 线程技术实现的,在 Mach 层中 thread_basic_info 结构体提供了线程的基本信息。
struct thread_basic_info {
time_value_t user_time; /* user run time */
time_value_t system_time; /* system run time */
integer_t cpu_usage; /* scaled cpu usage percentage */
policy_t policy; /* scheduling policy in effect */
integer_t run_state; /* run state (see below) */
integer_t flags; /* various flags (see below) */
integer_t suspend_count; /* suspend count for thread */
integer_t sleep_time; /* number of seconds that thread
has been sleeping */
};
任务(task)
任务(task)是一种容器(container)对象,虚拟内存空间和其他资源都是通过这个容器对象管理的,这些资源包括设备和其他句柄。严格地说,Mach 的任务并不是其他操作系统中所谓的进程,因为 Mach 作为一个微内核的操作系统,并没有提供“进程”的逻辑,而只是提供了最基本的实现。不过在 BSD 的模型中,这两个概念有1:1的简单映射,每一个 BSD 进程(也就是 OS X 进程)都在底层关联了一个 Mach 任务对象。
上面引用的是《OS X and iOS Kernel Programming》对 Mach task 的描述,Mach task 可以看作一个机器无关的 thread 执行环境的抽象;
一个 task 包含它的线程列表。内核提供了 task_threads API 调用获取指定 task 的线程列表,然后可以通过 thread_info API 调用来查询指定线程的信息,thread_info API 在 thread_act.h 中定义。
kern_return_t task_threads
(
task_t target_task,
thread_act_array_t *act_list,
mach_msg_type_number_t *act_listCnt
);
task_threads 将 target_task 任务中的所有线程保存在 act_list 数组中,数组中包含 act_listCnt 个线程。
kern_return_t thread_info
(
thread_act_t target_act,
thread_flavor_t flavor,
thread_info_t thread_info_out,
mach_msg_type_number_t *thread_info_outCnt
);
通过 act_list 数组可以读取该任务的所有线程,获取线程之后,对于每一个线程,可以用 thread_get_state 方法获取它的所有信息,信息填充在 _STRUCT_MCONTEXT 类型的参数中。这个方法中有两个参数随着 CPU 架构的不同而改变,因此需要注意不同 CPU 之间的区别(后面会统一讲)。在 _STRUCT_MCONTEXT 类型的结构体中,存储了当前线程的 Stack Pointer 和最顶部栈帧的 Frame Pointer,从而获取到了整个线程的调用栈。
线程的调用栈如下:(该图来自维基百科)
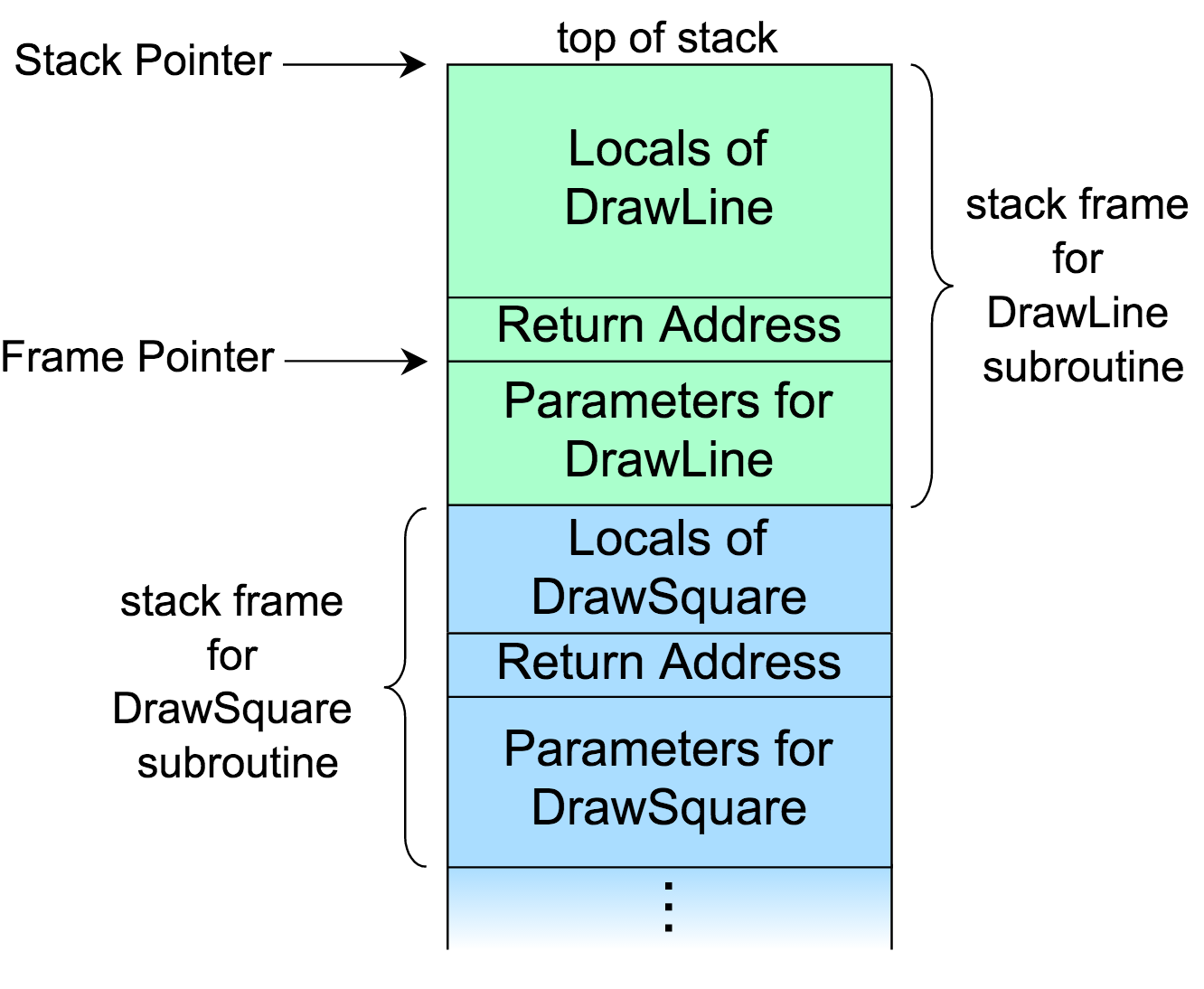
上图表示了一个栈,它分为若干栈帧(frame),每个栈帧对应一个函数调用;
那么我们先来学习下函数调用栈(汇编厉害的可以直接跳过);
汇编学习之函数调用栈
程序的执行过程可看作连续的函数调用。当一个函数执行完毕时,程序要回到调用指令的下一条指令(紧接call指令)处继续执行。函数调用过程通常使用堆栈实现,每个用户态进程对应一个调用栈结构(call stack)。编译器使用堆栈传递函数参数、保存返回地址、临时保存寄存器原有值(即函数调用的上下文)以备恢复以及存储本地局部变量。
不同处理器和编译器的堆栈布局、函数调用方法都可能不同,但堆栈的基本概念是一样的。
理解EIP、ESP、EBP
在x86处理器中,EIP(Instruction Pointer)是指令寄存器,指向处理器下条等待执行的指令地址(代码段内的偏移量),每次执行完相应汇编指令EIP值就会增加。ESP(Stack Pointer)是堆栈指针寄存器,存放执行函数对应栈帧的栈顶地址(也是系统栈的顶部),且始终指向栈顶;EBP(Base Pointer)是栈帧基址指针寄存器,存放执行函数对应栈帧的栈底地址,用于C运行库访问栈中的局部变量和参数。
注意,EIP是个特殊寄存器,不能像访问通用寄存器那样访问它,即找不到可用来寻址EIP并对其进行读写的操作码(OpCode)。EIP可被jmp、call和ret等指令隐含地改变(事实上它一直都在改变)。
不同架构的CPU,寄存器名称被添加不同前缀以指示寄存器的大小。例如x86架构用字母“e(extended)”作名称前缀,指示寄存器大小为32位;x86_64架构用字母“r”作名称前缀,指示各寄存器大小为64位。
栈帧指针寄存器
为了访问函数局部变量,必须能定位每个变量。局部变量相对于堆栈指针ESP的位置在进入函数时就已确定,理论上变量可用ESP加偏移量来引用,但ESP会在函数执行期随变量的压栈和出栈而变动。尽管某些情况下编译器能跟踪栈中的变量操作以修正偏移量,但要引入可观的管理开销。而且在有些机器上(如Intel处理器),用ESP加偏移量来访问一个变量需要多条指令才能实现。
因此,许多编译器使用帧指针寄存器FP(Frame Pointer)记录栈帧基地址。局部变量和函数参数都可通过帧指针引用,因为它们到FP的距离不会受到压栈和出栈操作的影响。有些资料将帧指针称作局部基指针(LB-local base pointer)。
在Intel CPU中,寄存器BP(EBP)用作帧指针。在Motorola CPU中,除A7(堆栈指针SP)外的任何地址寄存器都可用作FP。当堆栈向下(低地址)增长时,以FP地址为基准,函数参数的偏移量是正值,而局部变量的偏移量是负值。
函数调用回溯约定
程序寄存器组是唯一能被所有函数共享的资源。虽然某一时刻只有一个函数在执行,但需保证当某个函数调用其他函数时,被调函数不会修改或覆盖主调函数稍后会使用到的寄存器值。因此,IA32采用一套统一的寄存器使用约定,所有函数(包括库函数)调用都必须遵守该约定。
根据惯例,寄存器%eax、%edx和%ecx为主调函数保存寄存器(caller-saved registers),当函数调用时,若主调函数希望保持这些寄存器的值,则必须在调用前显式地将其保存在栈中;被调函数可以覆盖这些寄存器,而不会破坏主调函数所需的数据。寄存器%ebx、%esi和%edi为被调函数保存寄存器(callee-saved registers),即被调函数在覆盖这些寄存器的值时,必须先将寄存器原值压入栈中保存起来,并在函数返回前从栈中恢复其原值,因为主调函数可能也在使用这些寄存器。此外,被调函数必须保持寄存器%ebp和%esp,并在函数返回后将其恢复到调用前的值,亦即必须恢复主调函数的栈帧。
栈帧结构
函数调用经常是嵌套的,在同一时刻,堆栈中会有多个函数的信息。每个未完成运行的函数占用一个独立的连续区域,称作栈帧(Stack Frame)。栈帧是堆栈的逻辑片段,当调用函数时逻辑栈帧被压入堆栈, 当函数返回时逻辑栈帧被从堆栈中弹出。栈帧存放着函数参数,局部变量及恢复前一栈帧所需要的数据等。
编译器利用栈帧,使得函数参数和函数中局部变量的分配与释放对程序员透明。编译器将控制权移交函数本身之前,插入特定代码将函数参数压入栈帧中,并分配足够的内存空间用于存放函数中的局部变量。使用栈帧的一个好处是使得递归变为可能,因为对函数的每次递归调用,都会分配给该函数一个新的栈帧,这样就巧妙地隔离当前调用与上次调用。
栈帧的边界由栈帧基地址指针EBP和堆栈指针ESP界定(指针存放在相应寄存器中)。EBP指向当前栈帧底部(高地址),在当前栈帧内位置固定;ESP指向当前栈帧顶部(低地址),当程序执行时ESP会随着数据的入栈和出栈而移动。因此函数中对大部分数据的访问都基于EBP进行。
为更具描述性,以下称EBP为帧基指针, ESP为栈顶指针,并在引用汇编代码时分别记为%ebp和%esp。
函数调用栈的典型内存布局如下图所示:
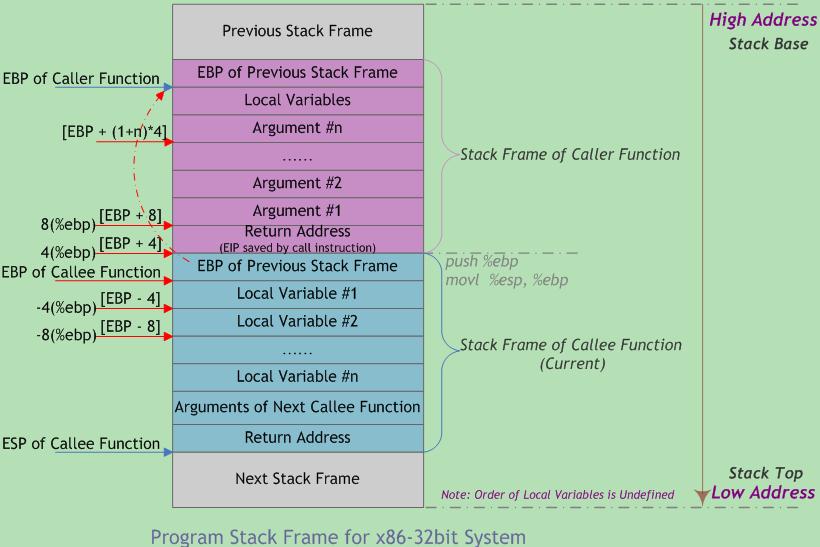
图中给出主调函数(caller)和被调函数(callee)的栈帧布局,”m(%ebp)”表示以EBP为基地址、偏移量为m字节的内存空间(中的内容)。该图基于两个假设:第一,函数返回值不是结构体或联合体,否则第一个参数将位于”12(%ebp)” 处;第二,每个参数都是4字节大小(栈的粒度为4字节)。在本文后续章节将就参数的传递和大小问题做进一步的探讨。 此外,函数可以没有参数和局部变量,故图中“Argument(参数)”和“Local Variable(局部变量)”不是函数栈帧结构的必需部分。
从图中可以看出,函数调用时入栈顺序为:
实参N~1→主调函数返回地址→主调函数帧基指针EBP→被调函数局部变量1~N
其中,主调函数将参数按照调用约定依次入栈(图中为从右到左),然后将指令指针EIP入栈以保存主调函数的返回地址(下一条待执行指令的地址)。进入被调函数时,被调函数将主调函数的帧基指针EBP入栈,并将主调函数的栈顶指针ESP值赋给被调函数的EBP(作为被调函数的栈底),接着改变ESP值来为函数局部变量预留空间。此时被调函数帧基指针指向被调函数的栈底。以该地址为基准,向上(栈底方向)可获取主调函数的返回地址、参数值,向下(栈顶方向)能获取被调函数的局部变量值,而该地址处又存放着上一层主调函数的帧基指针值。本级调用结束后,将EBP指针值赋给ESP,使ESP再次指向被调函数栈底以释放局部变量;再将已压栈的主调函数帧基指针弹出到EBP,并弹出返回地址到EIP。ESP继续上移越过参数,最终回到函数调用前的状态,即恢复原来主调函数的栈帧。如此递归便形成函数调用栈。
EBP指针在当前函数运行过程中(未调用其他函数时)保持不变。在函数调用前,ESP指针指向栈顶地址,也是栈底地址。在函数完成现场保护之类的初始化工作后,ESP会始终指向当前函数栈帧的栈顶,此时,若当前函数又调用另一个函数,则会将此时的EBP视为旧EBP压栈,而与新调用函数有关的内容会从当前ESP所指向位置开始压栈。
以上内容出自C语言函数调用栈(一),总结上面的内容就是Stack Pointer(ESP栈指针)表示当前栈的顶部,Frame Pointer (EBP栈基指针)指向的地址中,存储了上一次 Stack Pointer 的值,也就是返回地址,其中EIP是每个函数的入口;了解了这些之后,通过函数调用栈递归,可以知道该线程的函数栈的所有函数调用;
获取thread的状态信息
获取所有函数调用地址可以通过该方法获得,该方法可以访问目标内存空间;
kern_return_t vm_read_overwrite
(
vm_map_t target_task,
vm_address_t address,
vm_size_t size,
vm_address_t data,
vm_size_t *outsize
);
我们只要通过thread的入口地址,就可以回溯整个函数调用栈,而thread的所有信息都保存在了_STRUCT_MCONTEXT 类型的参数中;
该函数的用法如下:
typedef struct BSStackFrameEntry{
const struct BSStackFrameEntry *const previous;
const uintptr_t return_address;
} BSStackFrameEntry;
kern_return_t bs_mach_copyMem(const void *const src, void *const dst, const size_t numBytes){
vm_size_t bytesCopied = 0;
return vm_read_overwrite(mach_task_self(), (vm_address_t)src, (vm_size_t)numBytes, (vm_address_t)dst, &bytesCopied);
}
uintptr_t bs_mach_framePointer(mcontext_t const machineContext){
return machineContext->__ss.__ebp;
}
int main(){
//获取线程的state
_STRUCT_MCONTEXT machineContext;
mach_msg_type_number_t state_count = BS_THREAD_STATE_COUNT;
kern_return_t kr = thread_get_state(thread, BS_THREAD_STATE, (thread_state_t)&machineContext->__ss, &state_count);
//找出所有的函数调用地址
BSStackFrameEntry frame = {0};
const uintptr_t framePtr = bs_mach_framePointer(&machineContext);
bs_mach_copyMem((void *)framePtr, &frame, sizeof(frame)) != KERN_SUCCESS)
for(; i < 50; i++) {
backtraceBuffer[i] = frame.return_address;
if(backtraceBuffer[i] == 0 ||
frame.previous == 0 ||
bs_mach_copyMem(frame.previous, &frame, sizeof(frame)) != KERN_SUCCESS) {
break;
}
}
}
函数符号化
由于我们在上面回溯线程调用栈拿到的是一组地址,所以将函数地址进行符号化,这样才能够转化为对我们有用信息;
首先符号表是什么?
符号表储存在 Mach-O 文件的 __LINKEDIT 段中,涉及其中的符号表(Symbol Table)和字符串表(String Table)。符号表在 Mach-O目标文件中的地址可以通过LC_SYMTAB加载命令指定的 symoff找到,对应的符号名称在stroff,总共有nsyms条符号信息;也就是说,通过LC_SYMTAB来找存储在__LINKEDIT中的符号地址地址;
那么我们首先要通过__LINKEDIT寻址,把该段的地址都找出来,这样就可以通过LC_SYMTAB来定位符号信息了,通过__LINKEDIT寻找镜像地址可以看我的另一篇博客Mach-O学习;
补充: 所有的符号地址全部存储在__LINKEDIT段中(注意是地址),所有的符号和字符串以及字符串对应符号所对应的函数指针(保存为一个结构体nlist,下面会讲到)都存在LC_SYMTAB加载命令区中。
符号解析
接下来就是定位符号信息了,首先LC_SYMTAB的数据结构定义如下:
struct symtab_command {
uint32_t cmd; /* LC_SYMTAB */
uint32_t cmdsize; /* sizeof(struct symtab_command) */
uint32_t symoff; /* symbol table offset */
uint32_t nsyms; /* number of symbol table entries */
uint32_t stroff; /* string table offset */
uint32_t strsize; /* string table size in bytes */
};
这里我们用 MachOView 随意打开一个可执行文件,找到其中的 Symbol Table 项。
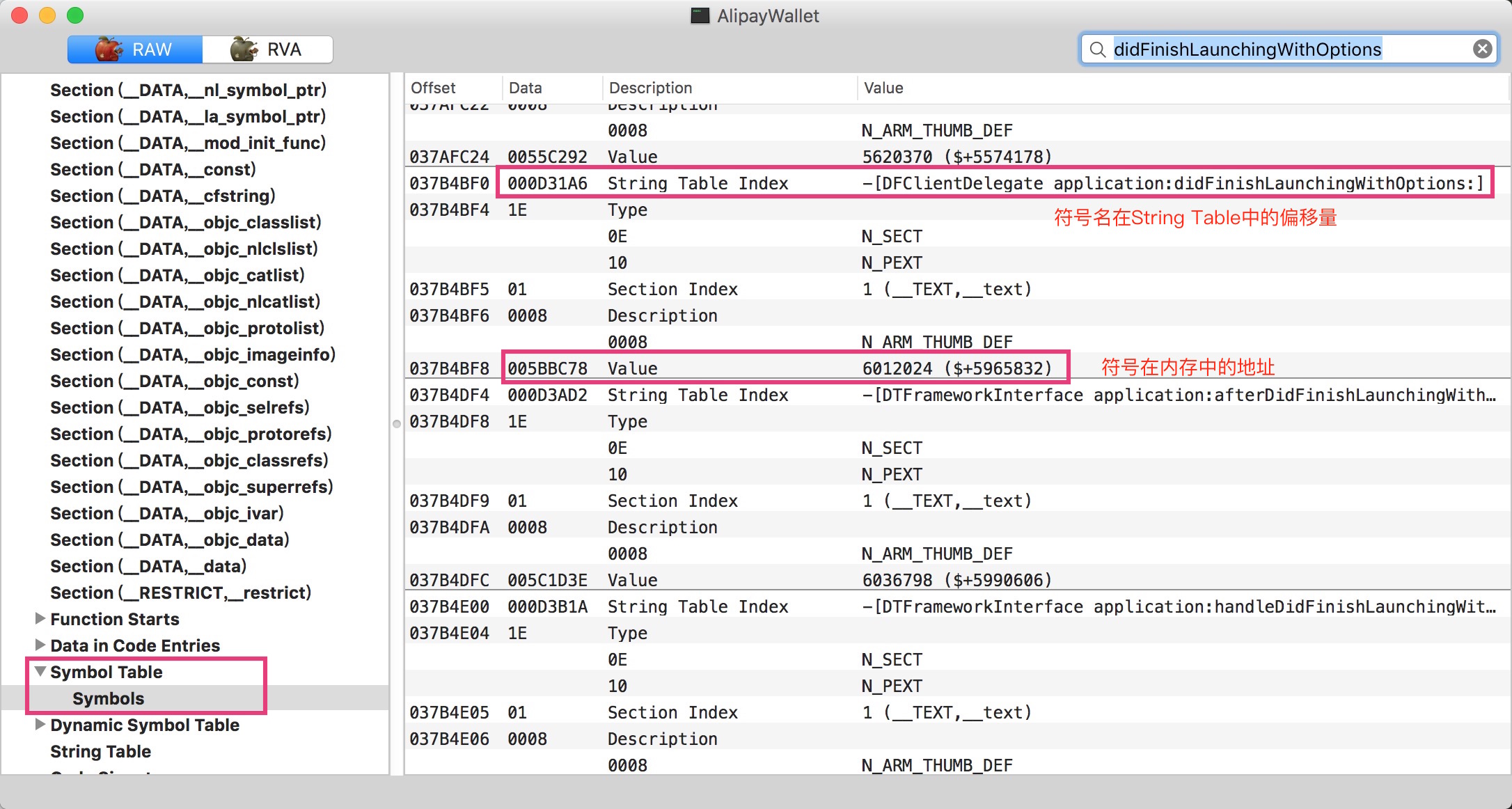
符号表的结构是一个连续的列表,其中的每一项都是一个 struct nlist。
// 位于系统库 头文件中
struct nlist {
union {
//符号名在字符串表中的偏移量
uint32_t n_strx;
} n_un;
uint8_t n_type;
uint8_t n_sect;
int16_t n_desc;
//符号在内存中的地址,类似于函数指针
uint32_t n_value;
};
这里重点关注第一项和最后一项,第一项是符号名在字符串表中的偏移量,用于表示函数名,最后一项是符号在内存中的地址,类似于函数指针(这里只说明大概的结构,详细的信息请参考官方Mach O文件格式的文档)。也就是说如果我们知道了符号名和内存地址的对应关系,我们是可以根据这个结构来逆向构造出符号表数据的。我们可以通过.n_un.n_strx来定位字符串表中相应的符号名。
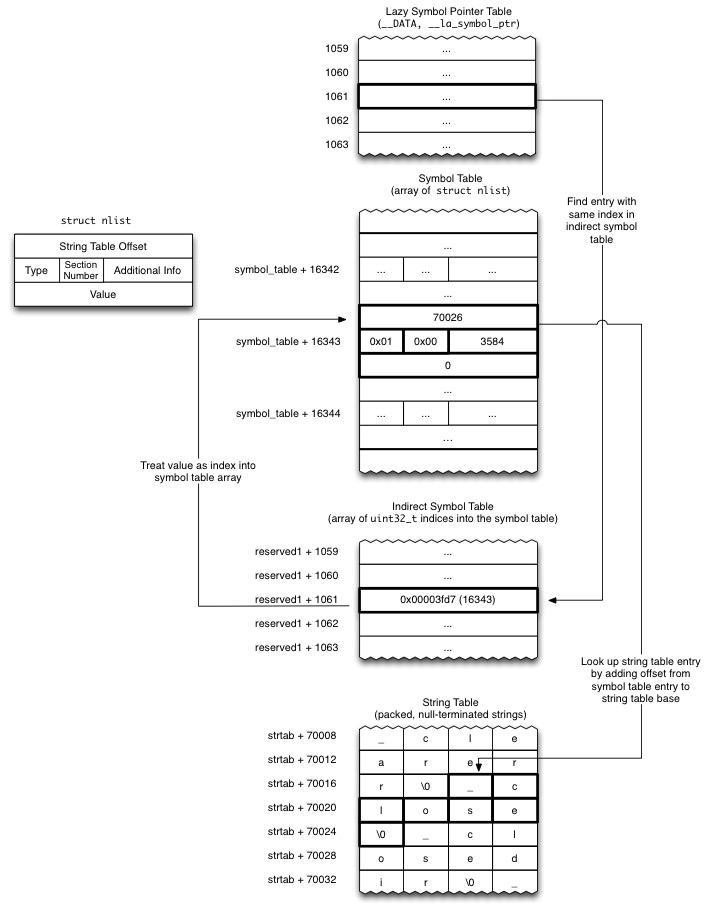
上图是官方的解释了如何找到字符串表对应的符号(字符串)
知道了如何构造符号表,下一步就是收集符号名和内存地址的对应关系了。

符号解析基本思路如下:
- 根据 Frame Pointer 拿到函数调用的地址(address)
- 寻找包含地址 (address) 的目标镜像(image)
- 拿到镜像文件的符号表、字符串表
- 根据 address 、符号表、字符串表的对应关系找到对应的函数名
这里有一点需要注意:由于虚拟地址和内存地址不一样,他们存在一个基于ASLR的偏移量,所以我们需要知道这个偏移才能够知道正确的地址,该偏移slide可以通过dyld_get_image_vmaddr_slide() 来进行获取,函数对应在符号表的地址、slide、frame Pointer address满足下面这个公式。
symbol address = frame pointer address + slide
链接时程序的基址 = __LINKEDIT.VM_Address -__LINKEDIT.File_Offset + silde的改变值
这里出现了一个 slide,那么slide是啥呢?先看一下ASLR
ASLR:Address space layout randomization,将可执行程序随机装载到内存中,这里的随机只是偏移,而不是打乱,具体做法就是通过内核将 Mach-O的段“平移”某个随机系数。slide 正是ASLR引入的偏移
// 链接时程序的基址
uintptr_t linkedit_base = (uintptr_t)slide + linkedit_segment->vmaddr - linkedit_segment->fileoff;
// 符号表的地址 = 基址 + 符号表偏移量
nlist_t *symtab = (nlist_t *)(linkedit_base + symtab_cmd->symoff);
// 字符串表的地址 = 基址 + 字符串表偏移量
char *strtab = (char *)(linkedit_base + symtab_cmd->stroff);
// 动态符号表地址 = 基址 + 动态符号表偏移量
uint32_t *indirect_symtab = (uint32_t *)(linkedit_base + dysymtab_cmd->indirectsymoff);
ok,我们拿到地址通过nlist数组取得信息之后,把解析之后的有效信息结果放入DL_info的结构体中(或者也可以不用放入,直接用一个const char*存储就行);
/*
* Structure filled in by dladdr().
*/
typedef struct dl_info {
const char *dli_fname; /* Pathname of shared object */
void *dli_fbase; /* Base address of shared object */
const char *dli_sname; /* Name of nearest symbol */
void *dli_saddr; /* Address of nearest symbol */
} Dl_info;
该结构的解释如下:
- fname:路径名,例如
/Applications/Xcode.app/Contents/Developer/Platforms/iPhoneSimulator.platform/Developer/SDKs/iPhoneSimulator.sdk/System/Library/Frameworks/CoreFoundation.framework/CoreFoundation - dli_fbase:刚才讲到的共享对象的的起始地址(Base address of shared object,下面叫做基地址,比如上面的 CoreFoundation)
- dli_saddr :符号的地址
- dli_sname:符号的名字,即函数信息:
[ViewController tableView:cellForRowAtIndexPath:]
经过上面的一番折腾之后,Thread的函数调用栈基本就全部了解了,首先通过task任务取得所有线程,然后取得线程的state,通过ESP、EBP、EIP来回溯整个函数调用栈,找出所有的函数地址,通过偏移计算出真实的内存地址,最后进行符号化,该篇的大概内容就是这样了。
补充:
由于上层的NSThread和内核线程thread没有直接的API可以知道对应关系,但是幸运的是两者的name是一样的;pthread 也提供了一个方法 pthread_getname_np 来获取线程的名字(实际NSThread就是调用了pthread 提供的接口),所以可以通过给thread的name赋值,来找到对应的NSThread,这样就实现了两者的互相转化;但是需要注意的地方是:主线程设置 name 后无法用 pthread_getname_np 读取到;所以需要在在 load 方法里获取主线程的thread_t ID:
static mach_port_t main_thread_id;
+ (void)load {
main_thread_id = mach_thread_self();
}
附录
各平台寄存器以及thread的state的区别,直接用宏定义区别开来;
#if defined(__arm64__)
#define BS_THREAD_STATE_COUNT ARM_THREAD_STATE64_COUNT
#define BS_THREAD_STATE ARM_THREAD_STATE64
#define BS_FRAME_POINTER __fp
#define BS_STACK_POINTER __sp
#define BS_INSTRUCTION_ADDRESS __pc
#elif defined(__arm__)
#define BS_THREAD_STATE_COUNT ARM_THREAD_STATE_COUNT
#define BS_THREAD_STATE ARM_THREAD_STATE
#define BS_FRAME_POINTER __r[7]
#define BS_STACK_POINTER __sp
#define BS_INSTRUCTION_ADDRESS __pc
#elif defined(__x86_64__)
#define BS_THREAD_STATE_COUNT x86_THREAD_STATE64_COUNT
#define BS_THREAD_STATE x86_THREAD_STATE64
#define BS_FRAME_POINTER __rbp
#define BS_STACK_POINTER __rsp
#define BS_INSTRUCTION_ADDRESS __rip
#elif defined(__i386__)
#define BS_THREAD_STATE_COUNT x86_THREAD_STATE32_COUNT
#define BS_THREAD_STATE x86_THREAD_STATE32
#define BS_FRAME_POINTER __ebp
#define BS_STACK_POINTER __esp
#define BS_INSTRUCTION_ADDRESS __eip
#endif
demo代码:
bool ksdl_dladdr(const uintptr_t address, Dl_info* const info) {
// 初始 Dl_info
info->dli_fname = NULL;
info->dli_fbase = NULL;
info->dli_sname = NULL;
info->dli_saddr = NULL;
// image index
const uint32_t idx = ksdl_imageIndexContainingAddress(address);
const struct mach_header* header = _dyld_get_image_header(idx);
// slide
const uintptr_t imageVMAddrSlide = (uintptr_t)_dyld_get_image_vmaddr_slide(idx);
const uintptr_t addressWithSlide = address - imageVMAddrSlide;
// 段基址
const uintptr_t segmentBase = ksdl_segmentBaseOfImageIndex(idx) + imageVMAddrSlide;
// 拿到了 Pathname
info->dli_fname = _dyld_get_image_name(idx);
// 拿到了基地址
info->dli_fbase = (void*)header;
// Find symbol tables and get whichever symbol is closest to the address
// 在符号表中查找哪个符号最接近这个指令的地址
// nlist
const STRUCT_NLIST* bestMatch = NULL;
uintptr_t bestDistance = ULONG_MAX;
// load commond
uintptr_t cmdPtr = ksdl_firstCmdAfterHeader(header);
// header->ncmds 代表所有的加载命令,这里进行遍历,查找 LC_SYMTAB
if(cmdPtr == 0) {
return false;
}
for(uint32_t iCmd = 0; iCmd < header->ncmds; iCmd++) {
const struct load_command* loadCmd = (struct load_command*)cmdPtr;
if(loadCmd->cmd == LC_SYMTAB) {
const struct symtab_command* symtabCmd = (struct symtab_command*)cmdPtr;
// 找到符号表
const BS_NLIST* symbolTable = (BS_NLIST*)(segmentBase + symtabCmd->symoff);
// 找到字符串表
const uintptr_t stringTable = segmentBase + symtabCmd->stroff;
// 遍历符号表
for(uint32_t iSym = 0; iSym < symtabCmd->nsyms; iSym++) {
// If n_value is 0, the symbol refers to an external object.
if(symbolTable[iSym].n_value != 0) {
uintptr_t symbolBase = symbolTable[iSym].n_value;
uintptr_t currentDistance = addressWithSlide - symbolBase;
// addr >= symbol.value 说明这个指令在这个函数入口中
// 获取和address的距离找到最接近的一个
// 离指令地址addr更近的函数入口地址,才是更准确的匹配项
if((addressWithSlide >= symbolBase) && (currentDistance <= bestDistance)) {
bestMatch = symbolTable + iSym;
bestDistance = currentDistance;
}
}
}
if(bestMatch != NULL) {
info->dli_saddr = (void*)(bestMatch->n_value + imageVMAddrSlide);
// 符号的名字
info->dli_sname = (char*)((intptr_t)stringTable + (intptr_t)bestMatch->n_un.n_strx);
if(*info->dli_sname == '_') {
info->dli_sname++;
}
// This happens if all symbols have been stripped.
if(info->dli_saddr == info->dli_fbase && bestMatch->n_type == 3) {
info->dli_sname = NULL;
}
break;
}
}
cmdPtr += loadCmd->cmdsize;
}
return true;
}
参考
- C语言函数调用栈(一)
- 获取任意线程调用栈的那些事
- iOS中线程Call Stack的捕获和解析(二)
- iOS 符号表恢复 & 逆向支付宝
- nlist-Mach-O文件重定向信息数据结构分析
- 趣探 Mach-O:符号解析
- vm_read
- Apple Open Source